EdgeAI2Wild: Integrate BlueROV-2 with NVIDIA Jetson for An Affordable Under-ice Sensing ROV.
Due to climate change, the Arctic is warming two-to-four times faster than the rest of the planet(BBC News: Climate change destroying homes across the Arctic, 2022, January). The Arctic environment is undergoing dramatic changes with sea ice affecting global biogeochemical cycles. Due to the lack of robust under-ice sensing techniques, the research of biogeochemical processes such as gas bubbles, basal ice melting, and drivers of sea ice algal blooms remains limited in the ice-covered area
AUVs and ROVs help Ocean research
Autonomous Underwater Vehicles (AUVs) are a very promising tool to obtain high-resolution spatial coverage of small-scale biogeochemical processes under the ice. AUV can be used for underwater missions such as detecting and mapping sunken ships, and rocks. Almost all the AUVs are initially developed for open-water applications. Remotely Operated Vehicles (ROVs) are unmanned underwater vehicles cabled to a ship. These cables provide two-way communication for transmitting control commands between the operator and the ROV, enabling the ROV to navigate remotely with video footage feedback.
Towards Under-ice Sensing using a Portable ROV
From 2020, Smart Ocean Systems Laboratory from the University of Rhode Island is working on the project of Navigating Unmanned Underwater Vehicles (UUVs) at the Ice-water Boundary. In their recent paper Towards Under-ice Sensing using a Portable ROV, the project team reported their progress in using a portable ROV for under-ice sensing, and demonstrate the feasibility of using small ROVs (0.7m long and 0.5m wide) to sample the under-ice environment near the coast. The recent field trials were conducted in Utqiagvik, Alaska in March 2022.

Embedded System with BlueROV2, add-on sensors and NVIDIA Jetson.
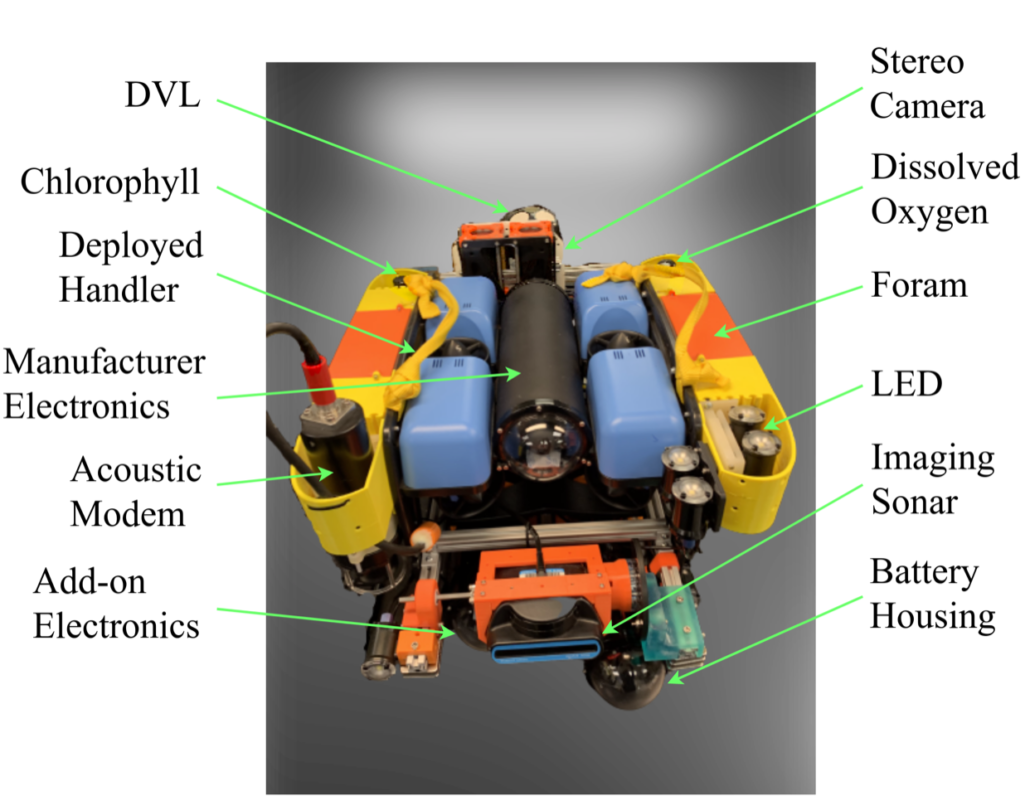
The under-ice ROV was developed based on the BlueROV-2 platform as a testbed because BlueROV comes with open-source control software and user interface software. Due to the lack of sensors on the base BlueROV model for good localization results, the project team integrated a suite of sensors to greatly improve the visual sensing and navigation of the vehicle. Professor Mingxi Zhou also shared with us the system integrated Seeed’s mini PC powered by NVIDIA Jetson NX Xavier to interface with all the add-on sensors using the Robotic Operating System (ROS) middleware. On the topside computer, there is the BlueROV user interface for remote control and a customized RViz interface for visualizing perceptual sensor measurements.
A photo of the upgraded ROV is shown in Figure 2. The under-ice ROV is developed based on the BlueROV- 2. The ground truth localization of the ROV was obtained using an Evologics 18/34 Acoustic modem on the vehicle side and a paired topside Ultra-short baseline (USBL) device. Meanwhile, an odometry fused from AHRS and DVL was available for the ROV pilot. To characterize the biochemical activities in the water column, a RBR dissolved oxygen optode and a Turner Design chlorophyll sensor were integrated.
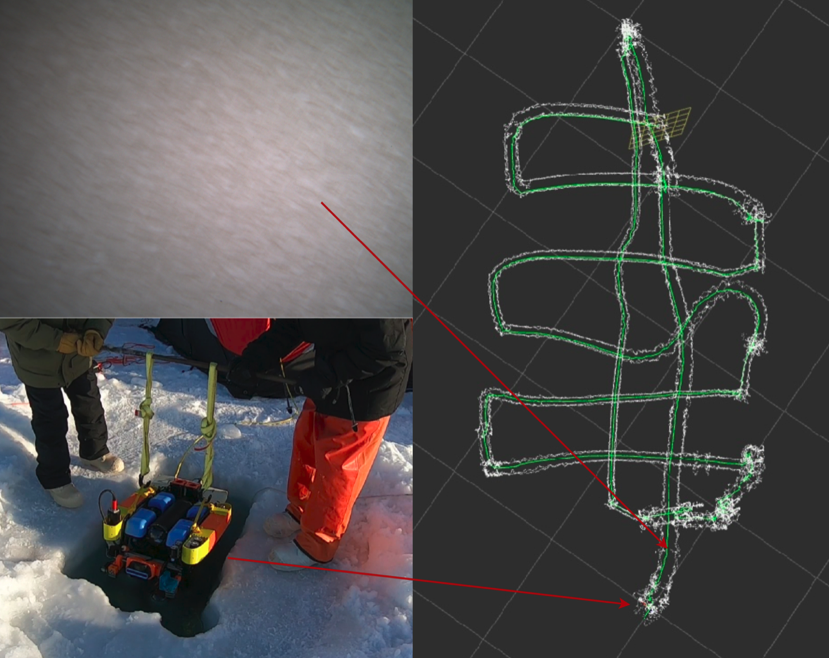
Field tests were conducted in March 2022 in Utqiagvik, Alaska on a flat landfast ice about several hundred meters off the coast. The ice thickness was about 1.5 meters. As shown in Fig. 3, ROV was lowered through a rectangle ice hole using straps with hooks at the end. The recovery was done by manually driving the ROV to the hole, then the straps will hook onto the ROV for lifting.
About BlueROV2
The BlueROV2 is the world’s most affordable high-performance ROV. With a 6-thruster vectored configuration, open-source electronics and software, and plenty of expandability, it’s the perfect ROV for inspections, research, and adventuring.

About Sub Mini PC
Jetson SUB Mini PC-Blue is based on the NVIDIA Jetson Xavier NX module, which delivers up to 21 TOPS, making it ideal for high-performance AI workloads in embedded and edge systems. The mini PC comes with the carrier board, heatsink preinstalled Jetpack, 128GB SSD, and enclosure. You can also check out our latest reComputer J20 built with 8GB/16GB Jetson Xavier NX module.

reComputer series for Jetson are compact edge computers built with NVIDIA advanced AI embedded systems: J10 (Nano 4GB) and J20 (Xavier NX). With rich extension modules, industrial peripherals, thermal management, reComputer for Jetson is ready to help you accelerate and scale the next-gen AI product by deploying popular DNN models and ML frameworks to the edge and inferencing with high performance, for tasks like real-time classification and object detection, pose estimation, semantic segmentation, and natural language processing (NLP).

Jetson Xavier NX can run a wide variety of advanced networks, including the full native versions of popular ML frameworks like TensorFlow, PyTorch, Caffe/Caffe2, Keras, MXNet, and others.
reComputer for Jetson is compatible with the entire NVIDIA Jetson software stack, industry-leading AI frameworks, development platforms like Edge Impulse, AlwaysAI, and cloud-based robot development tool Nimbus.