How to Program SLAMTEC MAPPER with ROS
ROS (Robot Operating System) is aim to provide robotic software developers with a flexible framework that includes a set of tools, libraries, and conventions. At the same time, ROS can also provide middleware like operating systems for heterogeneous computer clusters.

As an indispensable part of robot development, SLAMTEC ‘s autonomous positioning navigation program has been focusing on the construction of ROS ecology from the very beginning. Previously, SLAMTEC has realized the combination of ROS and RPLIDAR. More information can check it here: RPLIDAR AND ROS PROGRAMMING- THE BEST WAY TO BUILD ROBOT
The original SLAMWARE has always been a relatively independent system. Now we have released the ROS driver to embrace ROS better. By combining with the supporting ROS driver, the generated map and positioning data can be seamlessly integrated into the ROS environment.
Now we will teach you in this article about how to combine SLAMTEC Mapper with ROS to obtain maps and positioning data that generated by the mapping radar and also how to use it in other components of ROS for robot development and application.

This tutorial is divided into four steps:
1. Environmental setting preparation
2. Create a ROS workspace
3. Start SLAMTEC Mapper
4. Running
Let us follow the above steps to let SLAMTEC Mapper run on ROS (fully compatible with ROS).
1.Environmental setting preparation
Development environment:
Based on Ubuntu 16.04 operating system and equipped with ROS software package.
Hardware requirements:
To use ROS SDK, you need a SLAMTEC Mapper device or a mobile robot based on the SLAMWARE navigation and positioning system to enable and configure the appropriate IP address. The slamware_ros_sdk_server_node node will attempt to connect to the bot after it starts.
Download & Install SDK:
When the pre steps are ready, please download the ROS SDK for your platform and unzip it locally on the [Download and Support] page of the official website
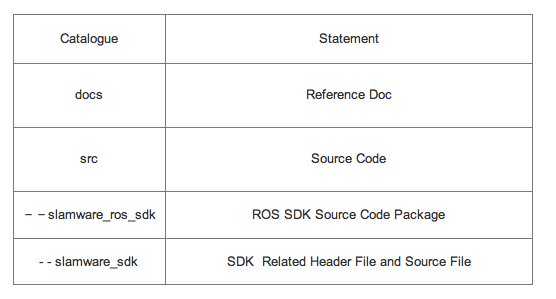
After downloading and installing, the Slamware ROS SDK contains the resources and code that you may use during the development process. The directory structure is organized as follows:
2. Create ROS workspace
Create a ROS workspace:
Put the source src into an empty working directory, such as: catkin_ws, use the catkin tool to initialize the workspace.

Compile

Configure the workspace system environment:

If you do not want to enter the above Source command every time, write the command to .bashrc, so that each time you start the terminal, it will automatically source.

Look at the ROS_PACKAGE_PATH environment variable to see if your workspace is properly included.

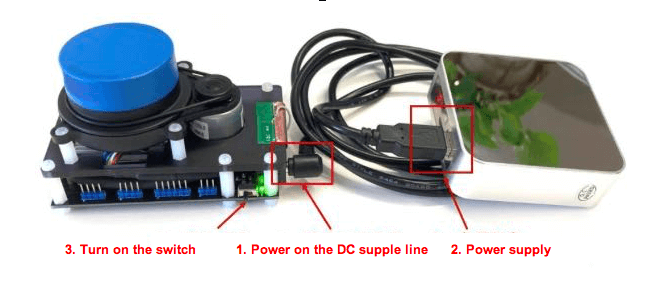
3. Run SLAMTEC Mapper
Take SLAMTEC Mapper M1M1 as an example. The installation steps are as follows:
4. Running
After the SLAMTEC Mapper is powered on, connect the SLAMWARE-XXXX Wifi under Linux and connect to the boot node.
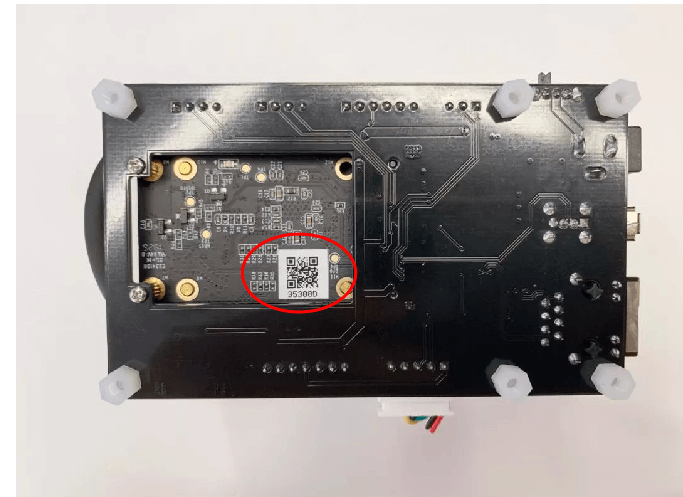
>>> If you can’t find the SLAMWARE – XXXX device number, please wait a moment, or try to reconnect.
Start node:
If the mobile robot is in AP mode, connect the robot WIFI and start the node.

If it is normal, you can view the normal screen through the RViz interface.
View through RViz:

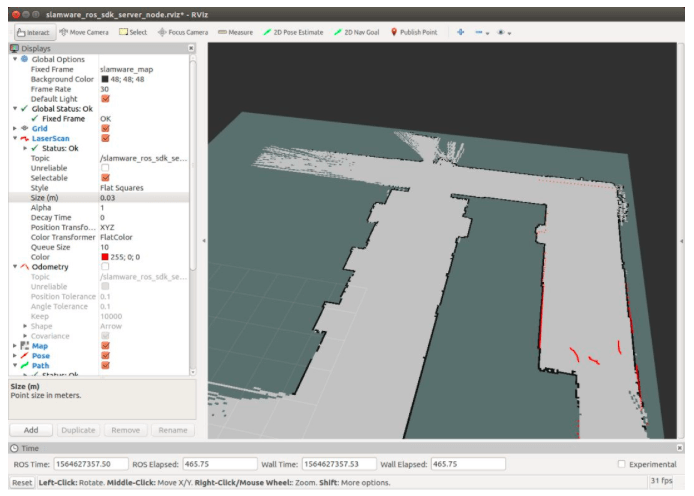
Finally, let’s see how the SLAMTEC Mapper works in RViz.The resulting map can zoom in, zoom out, move, and adjust the 3D perspective. In short, follow what you want to do.
Seeed now is offering free shipping for Slamtec Mapper M1M1 ToF Laser Scanner Kit – 20M Range. Hope you can enjoy hacking with it.
