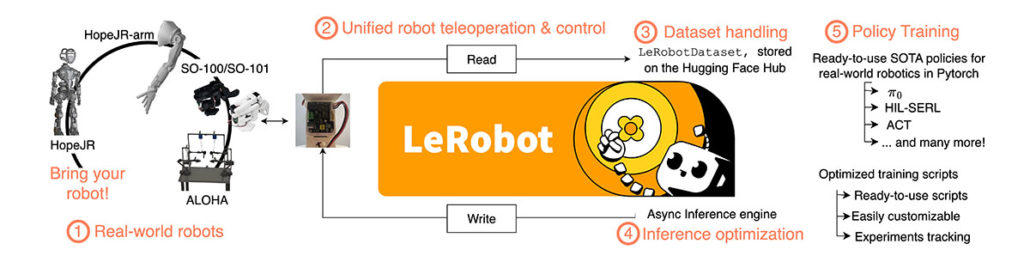
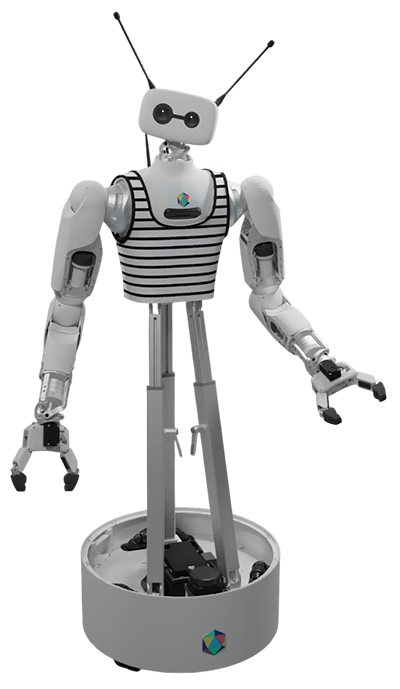
Hugging Face is a global open-source community focused on sharing and advancing machine learning systems through open models, datasets, and tools. During roboticsdevelopment, this open approach extends to LeRobot, a PyTorch-based framework for learning on real-world robots using imitation and reinforcement learning. Together with Pollen Robotics Reachy, an open-source humanoid robotsystem, it enables embodied AI development that bridges learning, data, and largemodeldeployment with physical AIagents.
Hugging Face
Explore at Hugging Face Robotics Ecosystem
LeRobotprovides a unified toolkit for real-robot control, multimodal data, and learning-based methods.Withstandardized robot interfaces, shared datasets, and separated planning and executionamongcommunity, it simplifies building and deploying robot learning systems.
Pollen Robotics is a Hugging Face–affiliated team focused on open-source robotic hardware and software, developing modular and extensible platforms such as Reachy seriesrobot–Reachy2humanoidrobot,ReachyMinidesktoprobot,AmazingHand,etc.
As an official manufacturing and ecosystem partner of Hugging Face, Seeed Studio offers the full lineup of Hugging Face open-source robot kits, ready off the shelf. We support developers with step-by-step getting-started wikis, verified demos with simplified tutorials, and professional technical support from our engineering teams.
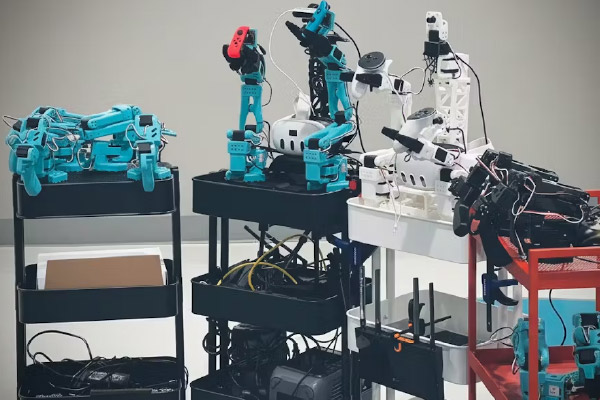
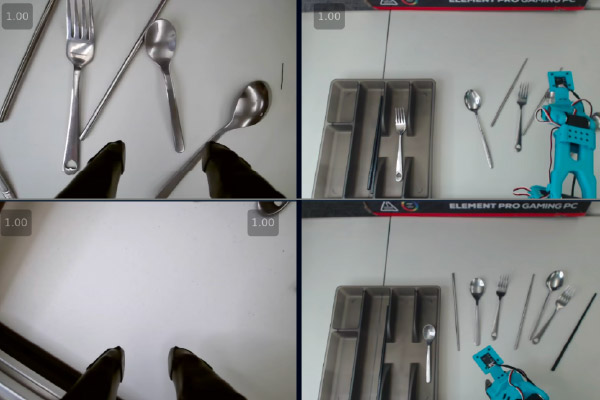
Having powered 20+ global events from Silicon Valley to Shenzhen in 2025, our hackathons have ignited700+ developers to turn Jetson powered projects—like bimanual matcha-making and VLA-driven cloth folding—into real-world embodied AIbreakthroughs.We invite developers to build the future of Embodied AI,makingPhysicalAIdeployedseamlesslyinreal–world