All you need to know about Slamtec RPLIDAR, MAPPER and Slamware
In this article, we will take you to review the main products line developed by Slamtec: RPLIDAR, MAPPER and Slamware. The latest release SLAMTEC MAPPER M1M1 combines feature of RPLIDAR and Slamware(a modular robot localization and navigation.
Slamtec RPLIDAR including A serial and S serial.
The main difference between the RPLIDAR A serial and the S serial is the measurement principle: the A serial uses the principle of triangulation, and the S serial uses the principle of TOF.
Overview of Triangular Ranging Lidar and TOF Lidar Principles
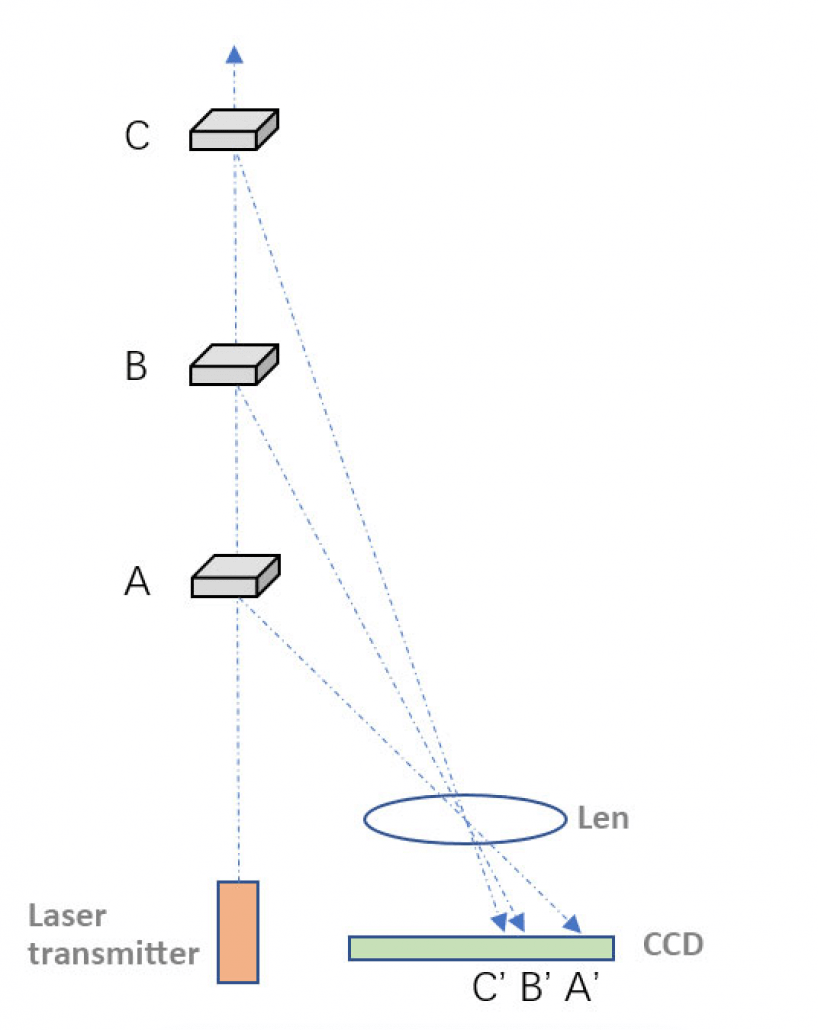
The principle of the trigonometric method is as shown in the figure below. The laser emits laser light. After the object is irradiated, the reflected light is received by the linear CCD. Since the laser and the detector are separated by a certain distance, according to the optical path, objects of different distances will be imaged in the CCD. On a different location. Calculated according to the triangle formula, the distance of the measured object can be derived.
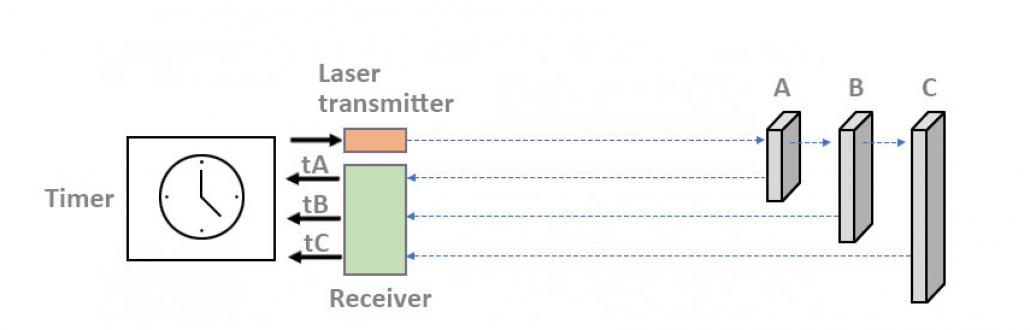
However, the principle of TOF. As shown in Figure 2, the laser emits a laser pulse, and the timer counts the time of the exit, the return light is received by the receiver, and the time is returned by the timer. When the two times are subtracted, the “time of flight” of the light is obtained, and the speed of light is constant, so the distance can be easily calculated after the known speed and time.
In principle, the TOF radar can measure farther distances. In fact, in some applications where distance measurement is required, such as driverless car applications, almost all are TOF radars. The triangular radar is not far off.
RPLIDAR A1, A2, and A3: low-cost 360-degree laser scanner best for indoor robotic SLAM application
RPLIDAR is a low-cost LIDAR sensor suitable for indoor robotic SLAM application. The produced 2D point cloud data can be used in mapping, localization and object/environment modeling. RPLIDAR will be a great tool using in the research of SLAM (Simultaneous localization and mapping)


Note: especially we offer Global Free Shipping for RPLIDAR A1M8.
RPLIDAR S1: Pocket low-cost TOF laser radar.
RPLIDAR S1 is a new generation of pocket low-cost TOF laser radar. It has 9200 laser ranging sampling capabilities per second and uses non-contact energy and signal transmission technology to overcome the life limit of the traditional laser scanner. The RPLIDAR S1 is reliable and stable for long periods of time. (Introducing RPLIDAR S1 – Portable TOF 360° Laser Range Scanner)
SLAMTEC Mapper: a new metamorphosis of laser scanners
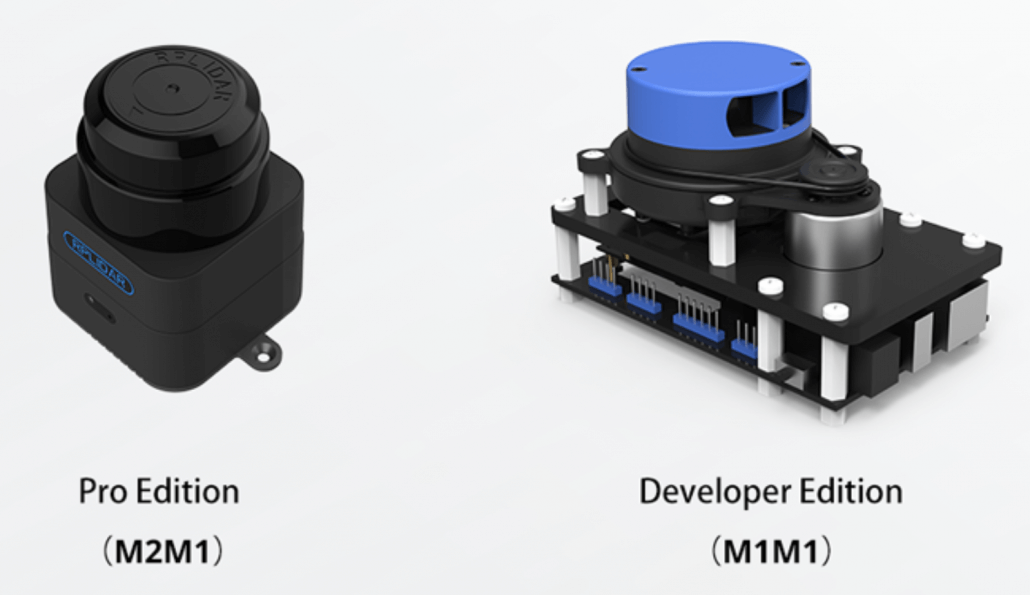
Slamtec MAPPER does not belong to RPLIDAR, however, it is a combination of RPlidar and Slamware. With a cost-effective $199 price, SLAMTEC MAPPER M1M1 performs powerful mapping ability specially with a handheld mode.
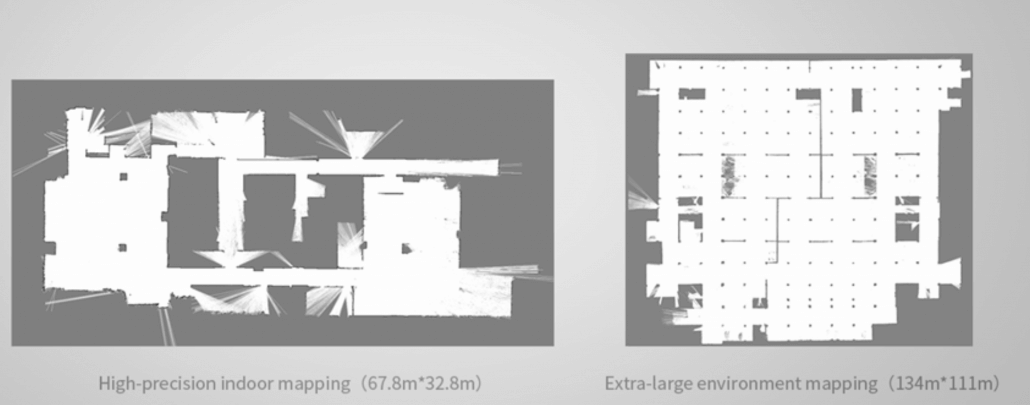
SLAMATEC Mapper is a new laser range scanner released by SLAMTEC. It is different from traditional laser scanners. It has built-in SLAM real-time map construction and positioning function, which is suitable for various applications such as robot navigation positioning, environmental mapping, and handheld measurement.
Slamtec Mapper has two different versions: developer edition M1M1 and professional industrial version M2M1 to meet different requirements.
At Seeed, we offer $300 off and free shipping for DHL express. Slamtec Mapper M2M1 is an industrial-grade LiDAR. Different from the normal LiDAR, M2M1 has the ability to work in some severe surroundings.
Specification Comparision
| Item | Measurement Performance | ||||
|---|---|---|---|---|---|
| Distance Range | Measurement Resolution | Angular Resolution | Sample Rate | Working Environment | |
| RPLIDAR A1M8 | 0.15m -12m | <0.5 mm | ≤1° | 2000 – 8000 Hz | Indoor |
| <1% of actual distance * | |||||
| RPLIDAR A2M6 | 0.2m – 18m | <0.5 mm | ≤0.9° | 2000 – 8000 Hz | Indoor |
| <1% of actual distance * | |||||
| RPLIDAR A2M8 | 0.15m -12m | <0.5 mm | ≤0.9° | 2000 – 8000 Hz | Indoor |
| <1% of actual distance * | |||||
| RPLIDAR A3M1 | White object: 25 meters | 0.225° | 16 kHz or 10 kHz | Indoor & Outdoor | |
| Dark object: 10 meters | |||||
| RPLIDAR S1 | White Objects: 40m | 3cm | 0.313°-0.587° | 9200 Hz | Indoor& Outdoor |
| Black Object: 10m | |||||
| SLAMTEC MAPPER M1M1 | 20m | 5cm | 7000 Hz | Indoor & Outdoor | |
Slamware Core: Modular Autonomous Robot Localization and Navigation Solution
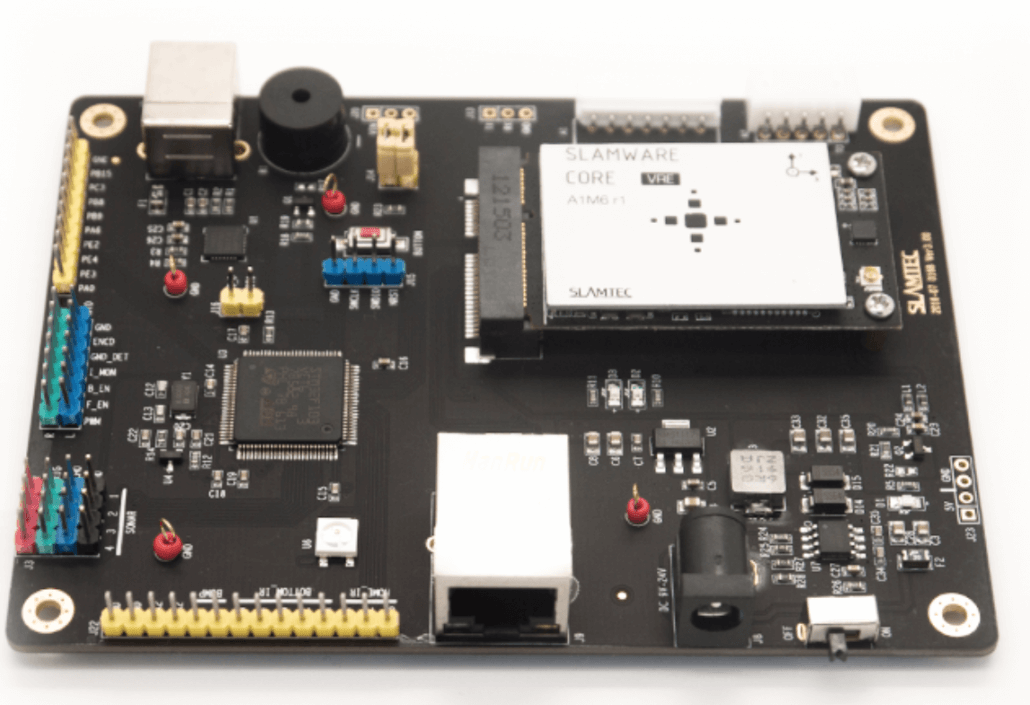
SLAMWARE is a modular robot localization and navigation system. It has integrated the simultaneous localization and mapping(SLAM) feature of RPLIDAR with the matched path finding feature. The host system can develop different new features based on the communication interfaces of SLAMWARE , the real time robot localization with high-resolution from SDK and the environmental map data generated in SLAMWARE.
Real Time Localization
SLAM technology, real time localization will be provided directly after the system launching and there is no need to get the whole map first.
Path Finding
With D* dynamic real time path finding algorithm, the system will automatically find the shortest path to the destination and control the behaviour of the host system.
High Resolution
The system provides the environmental map with resolution up to 5 centimeters and without error accumulating
Easy Integration
The system needs only minimum 5 V power supply and RPLIDAR connection to function well.
SDP Mini RPlidar Experimental Platform

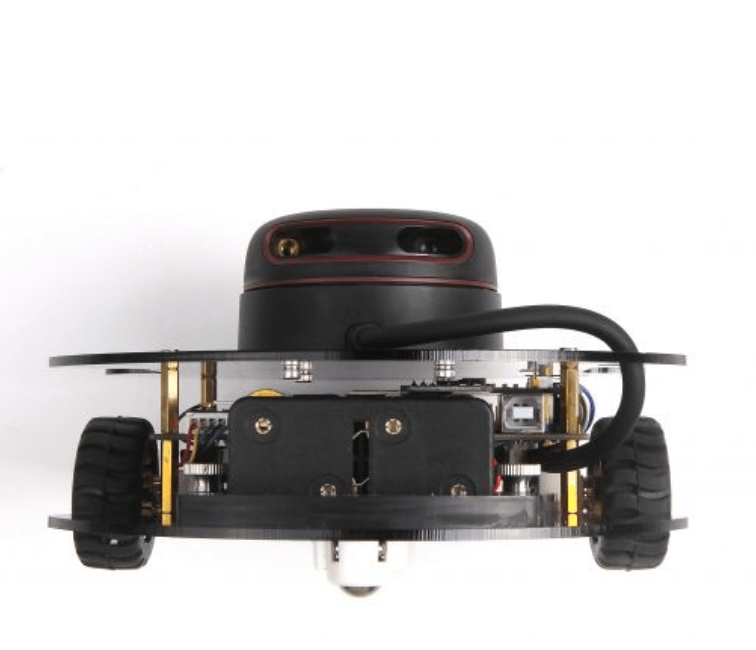
The SDP Mini is a small-size development platform designed by SLAMTEC for evaluating the performance of modular autonomous robot localization and navigation solution(SLAMWARE solution for short).
It is assembled by key components including SLAMWARE Core, RPLIDAR A2 and Breakout 3.0 board, and requires only 8 AA batteries to run well without concerns about batteries and charging.
The SDK of SDP Mini, supported to run in Windows/Linux/IOS and Android environment, integrates the whole SLAMWARE solution and extra reserved sensor interfaces.
How to better understand the specification and choose the most suitable RPLIDAR?
We got some customers’ feedback said specification of RPLIDAR is difficult to understand. This article will take you through important indicators of RPLIDAR.
Since RPLIDAR A serial is still being upgraded, and performance indicators tend to change. We took A2M8 as an example.
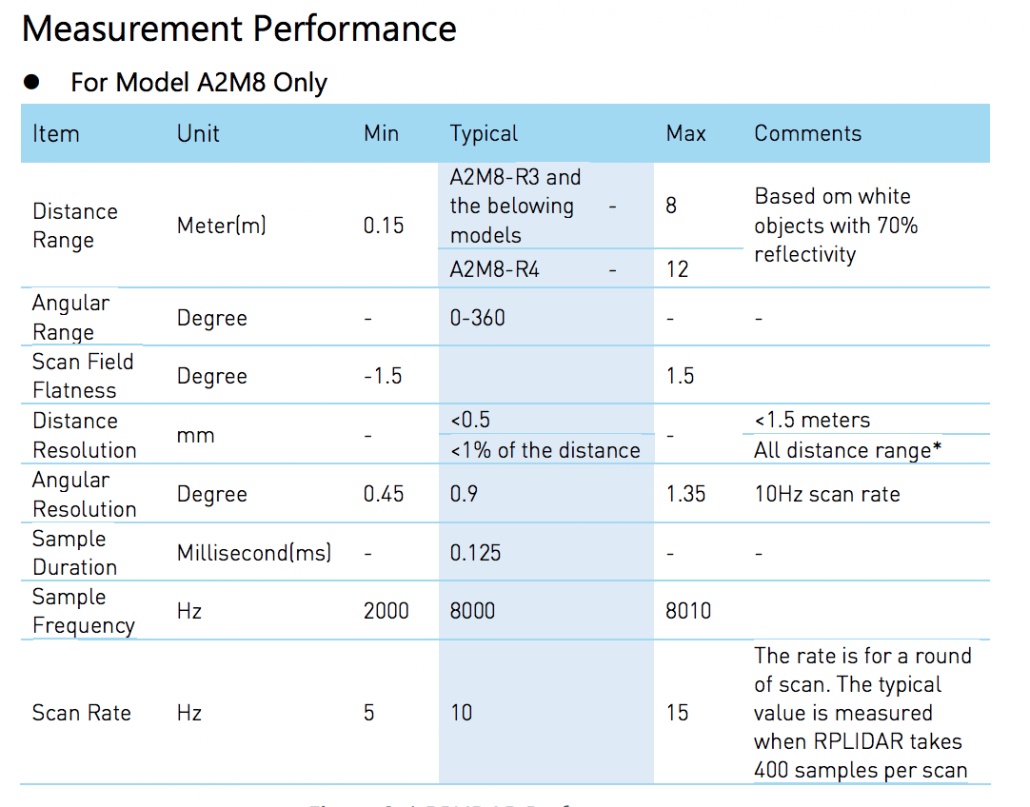
Measurement Range/Distance Range
Measurement Range refers to the range of distance that RPLIDAR can measure.
The distance that is too close is blind to the RPLIDAR and cannot be measured, so there is a minimum of 0.15 m.
The maximum value is the farthest distance that can be measured, here is 12 m. If the actual obstacle distance exceeds the maximum, the RPLIDAR data is marked as invalid (not the distance is 0).
In practice, the maximum value of radar ranging may change due to the working environment. In order for the radar to measure distance, it needs to receive the reflected laser. So the Slamtec officially added a note on the range of the range: “based on white 70% reflectivity objects.”
However, because different objects and environments are too different, usually you have to experiment on your own to see if it can be applied to the actual working environment.
For the same reason, transparent glass, because the reflection is not enough, laser radar often can not detect the presence of glass, sometimes need to add additional ultrasonic sensors or collision sensors to detect.
Angular Range
RPLIDAR 360° laser scanner. However, some radars are not, their the scanning angles are only 270°
n practice, it is usually not necessary to completely 360°, especially the radar is placed in the middle layer of the structure. Because of the existence of structural fixing devices, some will be partially blocked.
Is there some part of the occlusion that cannot be scanned? No, RPLIDAR is mounted on a movable platform, and it can be scanned as long as it is moved. Of course, the algorithm needs to be modified.
Measurement Resolution/ Distance Resolution
The accuracy of RPLIDAR is not a constant percentage. The simple explanation is that the farther the distance is, the more interference the reflected light receives and the lower the natural precision. In fact, there are some differences between the accuracy of different batches of radar. Because of these uncertainties, official documents give more conservative values.
Accuracy of less than 0.5 mm in the 1.5 m range is still possible, and about 1.5 parts per million at 1.5 meters.
When the maximum distance is 12 meters, if the accuracy drops to the worst 1%, the error is 0.12m.
Angle resolution
Normally, when the radar turns one turn, the measurement points obtained in this circle are evenly distributed, and the angle between each point is the so-called angular resolution.
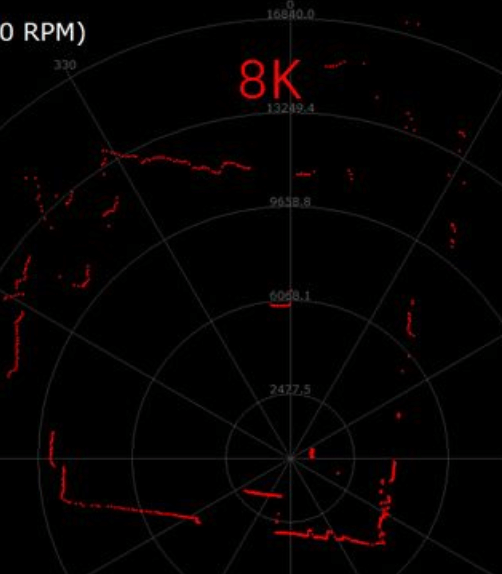
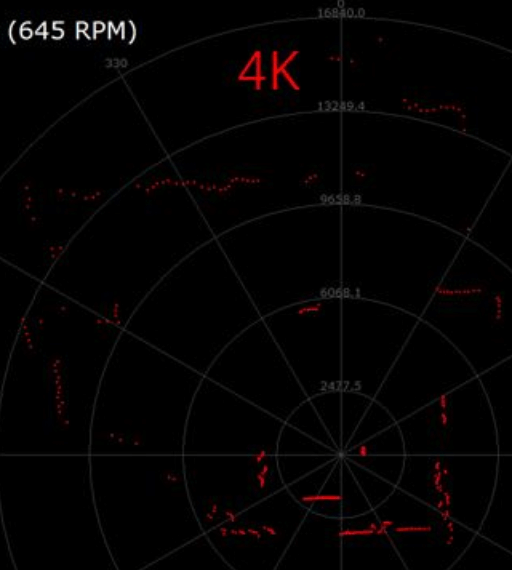
Obviously, the smaller the angular resolution, the more points the radar gets in one turn. For example, the angular resolution is 0.45, then one circle is 800 points, the angular resolution is 0.9, and one circle is 400 points.
However, the angular resolution of RPLIDAR is not necessarily fixed, that is, the spacing between two points is not necessarily the same, but they are all within the given resolution range. In ROS, the standard format of radar data considers the angular resolution to be fixed. In order to comply with the ROS standard, RPLIDAR’s ROS driver actually compensates for the angle and corrects the output points to be evenly distributed.
Measuring frequency
Measuring frequency refers to how many measurements can be made per second.
In fact, getting a laser spot is a measurement, so the measurement frequency is how many laser point data can be obtained per second.
The number of points per second is the speed per second of the radar multiplied by the number of points per revolution.
Sample Duration / Time for single measurement
Time for single measurement refers to how long it takes to get a laser point data. The typical time given by the document is 0.125ms, which indicates that the maximum measurement frequency that the radar can reach is 1s/0.125ms = 8000.
About Slamtec
Slamtec Technology is a technology company dedicated to providing robotic autonomous positioning and navigation solutions, and constantly innovating and popularizing their technology. Lidar is the core sensor of autonomous positioning and navigation technology
In 2014, Slamtec firstly released the first low-cost 360-degree laser scanner product called RPLIDAR A1.
In 2016, Slamtec upgraded the internal optics and algorithm system and released RPLIDAR A2. At the first time, the performance of the triangulation radar has exceeded 10Hz and 4000 sampling rates per second. In the same time, combined with the optical and magnetic fusion and brushless motor independently developed by Slamtec has greatly improved the life of the laser radar for up to 5 years.
Also, the triangulation laser radar is applied to commercial and industrial applications where performance and reliability are more demanding.
Hope this guide will quickly help you understand Slamtec, RPLIDAR, SALMTEC MAPPER and Slamware so that you can choose the most suitable and cost-effective laser scanner for your next application.
Reference: SLAMTEC Official Website