ToF (Time of Flight) vs Stereo Vision – 3D Imaging Technology Comparison
What is 3D imaging?
3D imaging is the process of capturing scenes or objects in three dimensions. This is different from traditional imaging techniques because the images taken by 3D cameras include information about the depth of the scene unlike images taken by traditional cameras. So, 3D imaging is able to mimic what we really see in 3D space by reconstructing a real-world three-dimensional viewing experience.
Where 3D imaging is used?
The ability to process depth information allows 3d cameras to be able to use in a wide range of applications such as:
- Face Recognition
- AR/VR
- Autonomous Driving
Different types of 3D imaging
In this blog, we are mainly going to talk about two 3D imaging techniques namely ToF and binocular stereo vision. They both are able to capture 3D images, however, they have their own advantages and disadvantages. We will explain about them at first and have a comparison between them later.
What is Stereo Vision?
Stereo vision works similar to how human eyes work. Normally there is a distance of 60mm to 70mm between the two eyes of a human result in one eye capturing a slightly different image than the other eye when both eyes are viewing the same object. The difference is generally the location of the image viewed by each eye. As we look at an object, the brain will process this difference in object location seen by each eye and translate into depth information and that is what we will finally see.
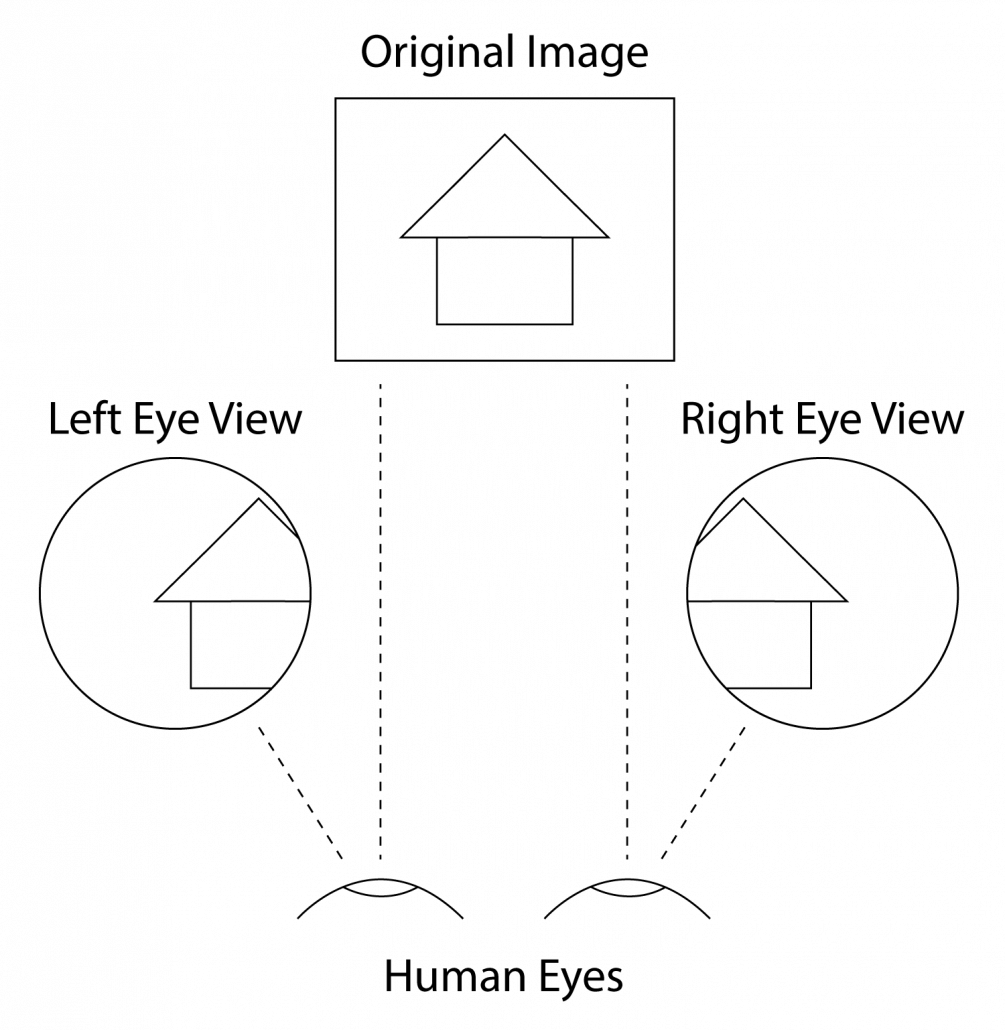
Similarly, stereo cameras have two lenses which are about 60mm apart and they also capture slightly different images just like the human eyes. Then just like our brain, a processor will process the image information and generate a depth map.
Stereo vision can be considered as a passive technique because it can only utilize the ambient light of the surrounding without using any external light and therefore it is only suitable to use outdoors with good lighting. If a stereo vision camera is used in low light conditions or if the scene has very few textures, it would not be easy for the camera to capture stereo features of the scene. In order to output images instantly at a higher resolution, the stereo camera should include a sensor that is very powerful to perform all the processing. Also, stereo cameras tend to work only in a short-range (within 2m).
3D Stereo Vision Camera offered by Seeed
IMX219-83 8MP 3D Stereo Camera Module – Compatible with Jetson Nano/ Xavier NX
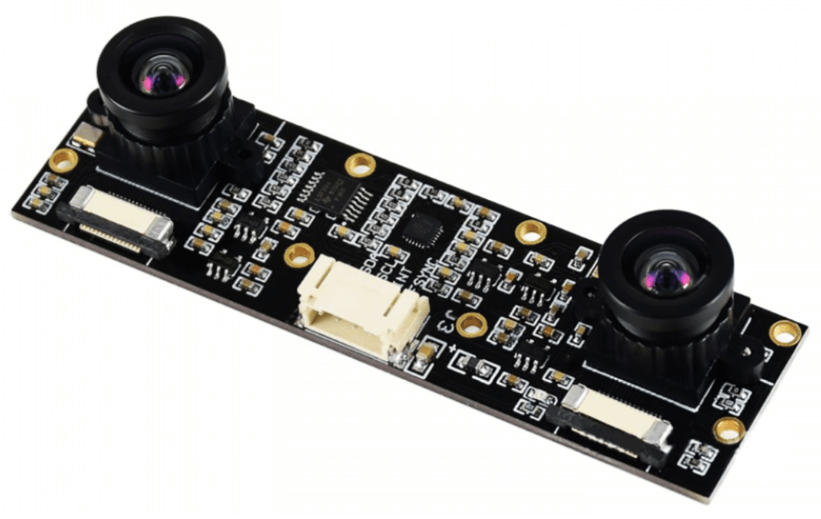
We offer the IMX219-83 8MP 3D Stereo Camera Module which features dual IMX219 cameras onboard with 8 megapixels on each camera. This is suitable to use with the NVIDIA Jetson Nano and NVIDIA Jetson Xavier NX Development Kits.
By using this camera, combined with a Jetson Nano/ Xavier NX Development Kits, you can simply realize AI vision applications like depth vision and stereo vision. Also, you can experience better quality video capture from this camera and build more demanding projects!
What is ToF?
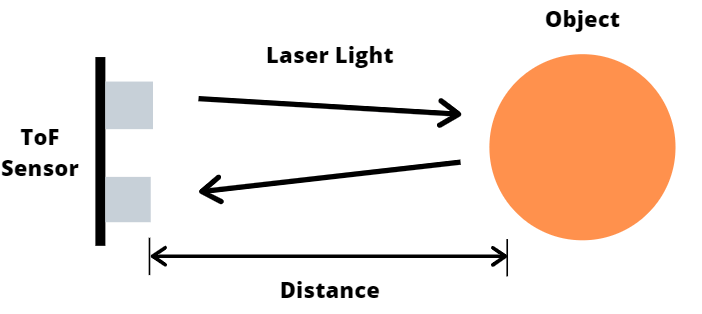
ToF stands for Time of Flight. ToF sensors use a tiny laser to fire out infrared light where the light produced out will bounce off any object and return to the sensor. Based on the time difference between the emission of the light and its return to the sensor after being reflected by an object, the sensor is able to measure the distance between the object and the sensor.
When using ToF cameras, providing a light source capable of illuminating the entire scene allows the sensor to determine the depth of all points. The results of this gives you a range map where each pixel encodes the distance to the corresponding point on the scene. Here is an example of what a ToF range map looks like:

False-color 3D image of a hand taken from pmdtec.com on April 29, 2019. Colors are mapped to individual pixels based on distance from the sensor to the hand (red is near, blue is far)
Unlike stereo vision, ToF is an active technique since it projects light to the scene instead of ambient light. Therefore, you can easily use a ToF camera even in dim light conditions. These cameras have the processing power and support longer distance ranges.
To learn more about ToF, check our blog What is a Time of Flight Sensor and How does a ToF Sensor work?
ToF Cameras offered by Seeed
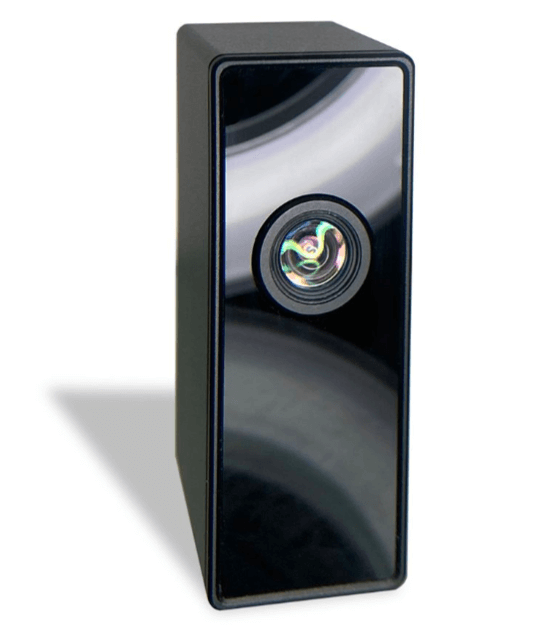
DepthEye Turbo – VGA ToF Camera with Sony IMX556PLR DepthSense™
DepthEye Turbo is equppied with IMX556, which is a fully integrated optical Time-of-Flight (ToF) camera sensor. The sensor features 640 x 480 (VGA) time-of-flight pixels based on the DepthSense® pixel technology. Combined with a modulated light source, this sensor is capable of measuring distance and reflectivity with VGA resolution.
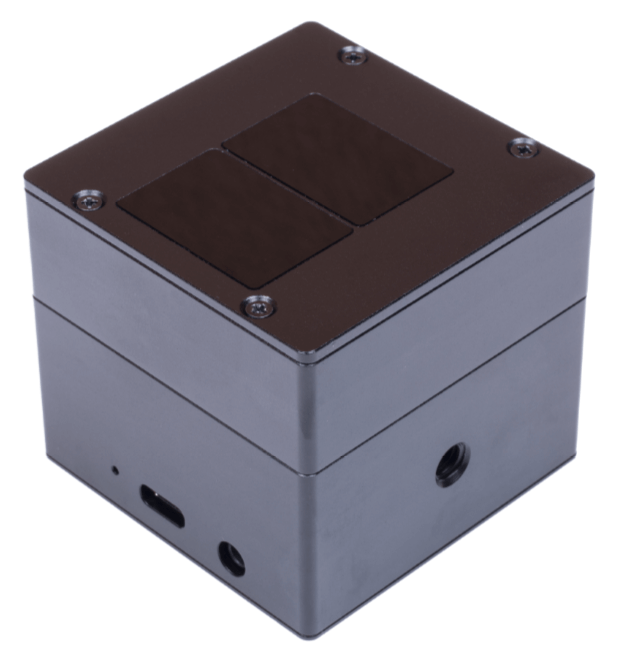
OPNCAM8008 Hawk 588-1MA-UA 3D ToF Camera
OPNCAM8008 Hawk 588-1MA-UA 3D ToF Camera is a 3D ToF camera that has high integration, high precision, long measurement range, and low power consumption. This consists of a ToF image sensor, VCSEL driver, and a ToF ISP.
OPNCAM8508 uses USB 3.0 as the communication interface with a PC or application processor and is ideal for 3D depth sensing applications.
OPNCAM8508 Dolphin 197-1MA-UA USB 3.0 Interface 3D ToF Camera

OPNCAM8508 Dolphin 197-1MA-UA is a 3D ToF camera which has high integration, high precision, and low power consumption. This consists of a ToF image sensor, VCSEL driver and a ToF ISP.
OPNCAM8508 uses USB3.0 as the communication interface with a PC or application processor and is ideal for 3D depth sensing applications.
OPNCAM8508 Dolphin 197-1MA MIPI Interface 3D ToF Camera

OPNCAM8508 Dolphin 197-1MA is a 3D ToF camera that has high integration, high precision, and low power consumption. This consists of a ToF image sensor, VCSEL driver and a ToF ISP002E
OPNCAM8508 uses MIPI as the communication interface with a PC or application processor and is ideal for 3D depth sensing applications.
Opne8008B – QVGA Time-of-Flight Sensor Evaluation Kit
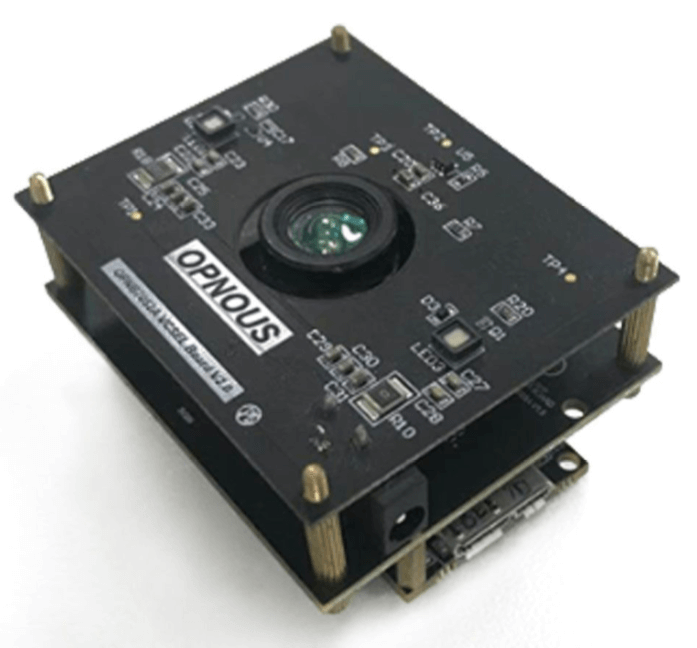
Opene8008B – QVGA Time-of-Flight Sensor Evaluation Kit is a high-resolution ToF camera to get the depth image. It is assembled with Opene8008B – QVGA ToF chip which can reach the resolution of 320×240 and all necessary hardware to operate Opene8008B includes both the camera lens and illumination. It can be connected to a PC for real-time visualization and recording of depth map data.
Stereo Vision vs ToF
Let’s now have a comparison between stereo vision and ToF
| Stereo Vision | ToF | |
|---|---|---|
| Working distance | ≤2m | 0.4-5m |
| Accuracy | 5%-10% of distance | ≤0.5% of distance |
| Resolution | medium | low |
| Power consumption | comparatively high | medium |
| Use environment | environment with ambient light or outdoor | indoor and outdoor |
| Frame rate | high | variable |
| Hardware cost | low | medium |
| Software processing requirement | high | low |
Conclusion
We hope that this blog helped you understand the different 3d imaging technologies and we are looking forward to seeing your build projects using these cameras!