reBot RS Newly launched – more stable control, more accurate positioning!
The reBot Arm B601-RS is now officially launched across the board, with an early bird price of $1499 within one month of its launch! This is a 6+1 degree-of-freedom low-cost open-source robotic arm centered around “true open source” and built on RobStride Dynamics’ collinear direct-drive joint motors, aiming to significantly lower the learning threshold of Physical AI from simulation to the real world (Sim-to-Real).

How to understand “fully open source”?
- Hardware: Complete STEP files, CNC and 3D printed part drawings, detailed BOM list
- Software: Python SDK, ROS1/2 + MoveIt Interface, Pinocchio Dynamics Example
- Algorithm platform compatibility: Hugging Face LeRobot, NVIDIA Isaac Sim
- Documents: Graphic + Video Assembly Tutorial, Wiring Instructions, Calibration Steps, Environment Deployment Guide
All resources are freely available to individual developers, students, and educational institutions, with no licensing fees.
Key Features
Compared to the widely popular previous generation B601-DM version, the RS version brings the following important upgrades:
- Higher Precision: Repeatability accuracy improved from ±0.2 mm to ±0.1 mm, with a 754 mm working radius and a payload capacity of 2.5 kg (max 5 kg), meeting more demanding tasks.
- Enhanced texture: The addition of geometric cutouts, high-gloss C-shaped edges, CD-patterned metal discs, and laser-engraved characters makes the appearance more professional and the touch more delicate.
- Better Experience: The overall arm length is more compact, using high-strength CNC components for a more robust structure; meanwhile, the structure of components has been optimized to make wiring and assembly easier.
- Continuity and Compatibility: It continues the series design language and is also fully compatible with mainstream tools such as ROS1/2, Isaac Sim, LeRobot, and Pinocchio.
Click here to purchase:https://www.seeedstudio.com/reBot-Arm-B601-RS-Assembled-Kit-with-Gripper-p-6865.html
Note:
- Power Supply, Gripper, and Teleoperation Instructions (For Developers)
- Default without power supply: You can optionally purchase the official 48V 15A power supply, or buy a Mean Well power supply of the same specification on your own.
- G-clamps need to be provided by yourself: purchase them according to the thickness of the desktop.
- Teleoperation experience: Requires an additional purchase of Star Arm 102-L as the leader arm, and a 12V 10A power supply is required.
The driving force behind precision: RobStride Dynamics
The reBot Arm B601-RS is equipped with the joint motors of RobStride Dynamics, namely 4 RS-00 modules and 3 RS-06 modules, which are specifically designed for high torque, low noise, and stable output. As one of the core suppliers in China’s embodied intelligence field, RobStride Dynamics’ Quasi-Direct Drive (QDD) technology and highly integrated services provide reversibility and force transparency for Physical AI systems. This means that RS can not only achieve precise positioning but also respond naturally to external forces, whether you are performing delicate tasks through teleoperation or training strategies through imitation learning.

RS vs DM: It’s not about “who is better” but “who is more suitable”
Simple model selection suggestions: For higher precision, industrial texture, and compact structure → RS; for high explosive power, cost sensitivity, and general development → DM.
| Core Requirements | RS | DM |
| Repeating positioning accuracy of ±0.1 mm | ✅ | ❌ |
| High peak force required (fast impact motions) | ❌ | ✅ |
| Industrial automation / precision laboratory operations | ✅ | ❌ |
| Compact structure & high-strength CNC machined parts required | ✅ | ❌ |
| DIY assembly & custom modification desired | ✅ | ✅ (Both are open-source) |
Core application scenario: A robotic arm covering four cutting-edge fields
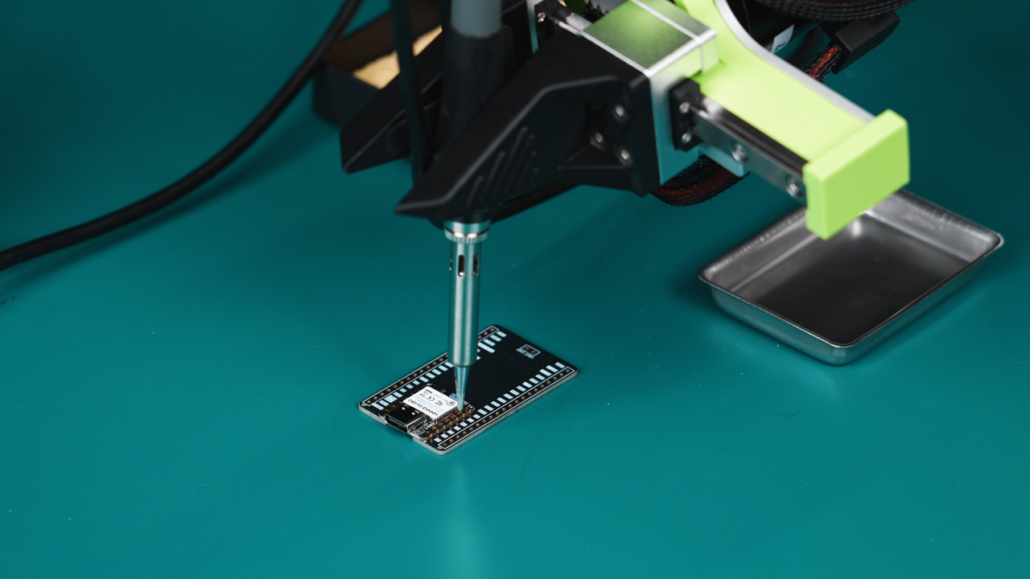
- Industrial automation
B601-RS, with its high precision of ±0.1 mm, is capable of handling tasks in precision manufacturing, assembly, and inspection. It can reliably perform delicate operations such as part insertion and screw tightening on automated production lines. Its compact and lightweight design enables it to be quickly integrated into existing industrial work cells without significant modification.
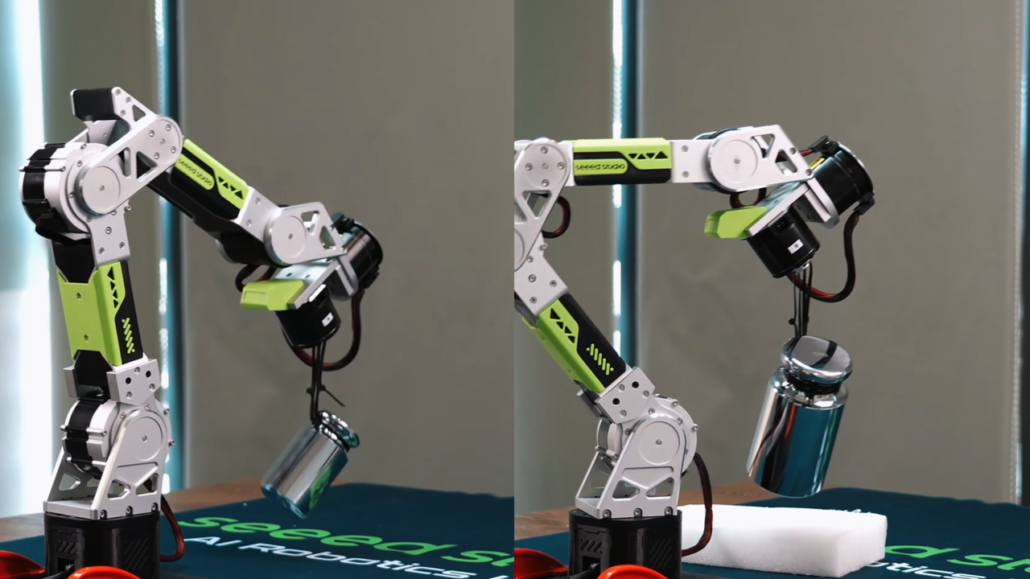
- Logistics and Material Handling
With a rated load of 2.5 kg (maximum 5 kg), the B601-RS can support grasping, transferring, and heavy handling operations. Whether in a warehouse or conveyor belt environment, it can perform sorting and palletizing tasks, reducing repetitive manual labor. Its compact design enables it to operate flexibly between narrow storage aisles or transfer stations.
- Teleoperation and Embodied Intelligence Development
B601-RS is perfectly compatible with mainstream robot learning frameworks such as Hugging Face LeRobot and NVIDIA Isaac Sim, streamlining the entire process of remote control, Data Acquisition, AI model/strategy training, and deployment. As a flexible “hand” unit of the Physical AI system, it can record motion and force feedback data for robot reinforcement learning and understanding environmental dynamics through world models. This open ecosystem significantly lowers the threshold for algorithm verification, helping developers smoothly deploy strategies from simulation to the real world.

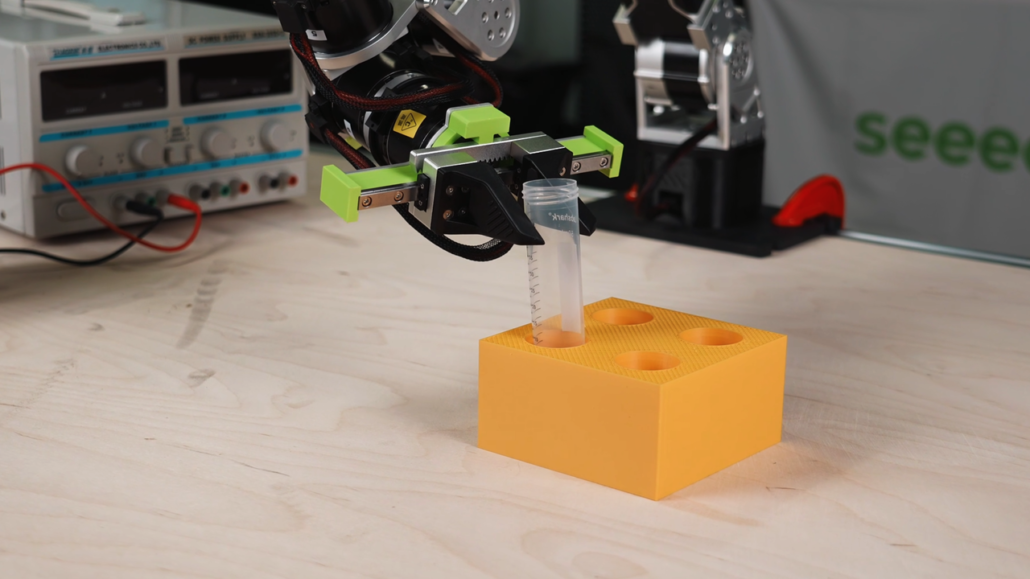
- Research and Laboratory Automation
High-precision, repeatable motion makes the B601-RS an ideal choice for liquid handling, sample transfer, and automation of experimental processes. Its smooth and compliant motion control allows for delicate operations on fragile samples (such as biological tissues or microfluidic chips). The open software and hardware interfaces enable researchers to customize experimental steps, accelerating prototype validation in fields such as drug screening or material testing.
Now start experiencing the actual deployment of end-to-end Physical AI
- Obtain open-source materials.
The GitHub repository contains all hardware drawings, BOMs, SDKs, and tutorial links.
- Select configuration
Determine whether to purchase official power supplies, grippers, and teleoperation kits subsequently.
- Assembly and Calibration
Follow the illustrated or video tutorials to complete physical assembly, wiring, firmware flashing, and calibration.
- Run the first demo
Start with the Python SDK or ROS routines to confirm motion control and accuracy.
- Try the Physical AI workflow
Use LeRobot to collect teaching data, train a simple algorithmic strategy, and deploy it to a real robotic arm.
Global Workshop Partner Recruitment Program
Welcome to join the Seeed Developer Ecosystem and share the reBot robotic arm and its related technology stack and architecture with your local development ecosystem network! This is not a commercial collaboration but a co-construction of a technical community:
- If you are a developer community, maker space, or university laboratory: you can jointly organize offline activities such as workshops and Hackathons by means of hardware borrowing or discounted procurement.
- If you are a content creator, a graduate student from a university, or a competition participating team: you can apply for hardware sponsorship and jointly produce content such as tutorials, case studies, algorithm porting, and publish technical papers with Seeed.
For event details and registration methods, please visit: https://www.seeedstudio.com/seeed-physical-ai-global-workshop-partnership-program

We look forward to everyone using the reBot robotic arm to create automation solutions that can truly solve complex real-world problems. During the development period, you are welcome to join the Seeed Embodied Intelligence Communication Group at any time, seek technical support and application advice from the Seeed reBot engineer team, and share every step of your progress!