How to Choose the Right NVIDIA Jetson Carrier Board for Your Embedded System

The following diagram outlines a high-level approach to Jetson carrier board selection, focusing on module tier, system form, and design priorities.
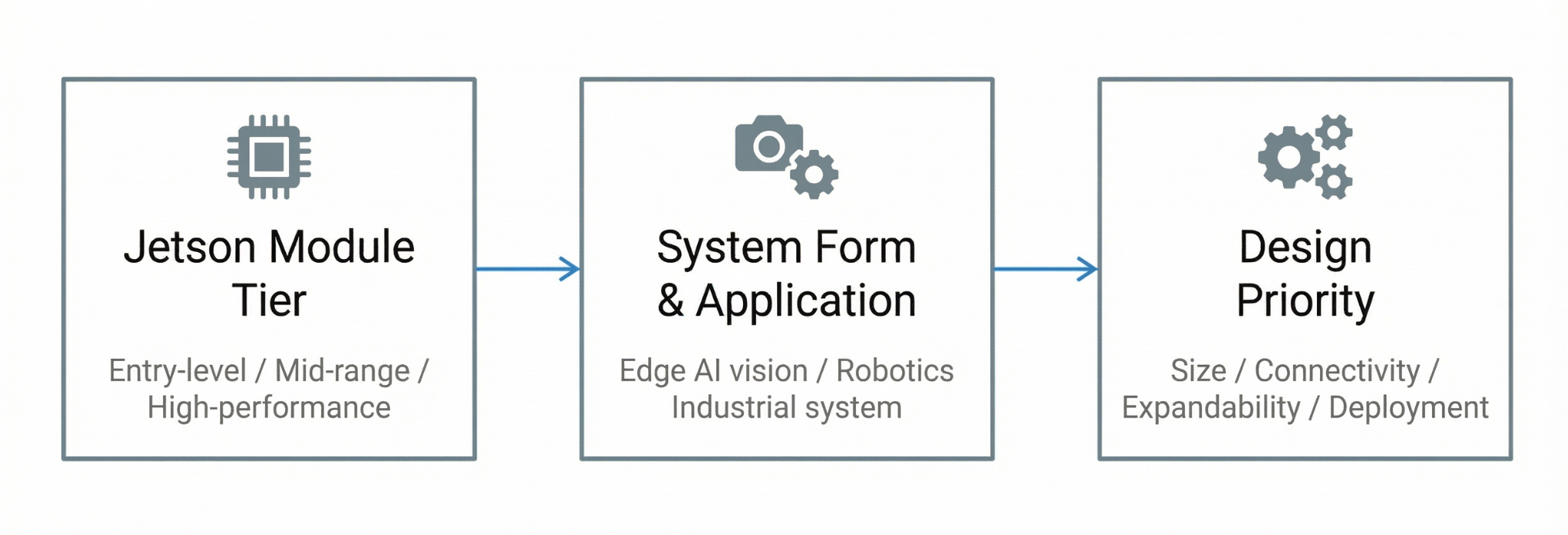
Module Tier Defines the Design Boundary
Different Jetson modules—such as Orin Nano, Orin NX, and AGX Orin—vary significantly in performance, power envelope, and available interfaces. The module tier directly limits the feasible carrier board options and the overall system architecture.
The Carrier Board Is Part of the System Design
A carrier board should never be considered in isolation. It must work together with peripherals, enclosure design, thermal solutions, and power delivery to form a complete and reliable system.
Design Priorities Must Be Explicit
Size, connectivity, expandability, and deployment constraints rarely can be optimized simultaneously. Making trade-offs explicit is essential for a selection process that can actually be executed.
Hi There — I want to have a good solution for my home AI and wondering if a Jetson would be better than the NVIDIA 3060 that I use now, or a 3090 which would cost me about the same as a Jetson AGX… can you help me decide which one would have better performance ?
For a home AI system, it really depends on your specific use case. In terms of raw compute performance, an RTX 3060 or 3090 will generally outperform a Jetson AGX. However, Jetson platforms are designed for low-power, always-on edge deployment, while desktop GPUs are typically better suited for higher local inference workloads.